| Cours 12: Application: A class America’s cup |
3.1 Loi de contrôle exacte
Loi de contrôle exacte
Nous définissons le contrôle $\delta ^0\in H^1_0(]0,T[)$ par (cours 9 et AC p.16 ):
\[ \boxed {\begin{array}{l}a_0\delta ^0-b_0\ddot\delta ^0=({\mathcal E},\dot P^1)_2-({\mathcal B}, P^1)_2,{\mathcal M}\ddot P^1+\hskip1.42263779528pt^ t{\mathcal C}\dot P^1+\hskip1.42263779528pt^ t{\mathcal K}P^1=0,\\ P^1(0)=\Phi _0,\dot P^1(0)=\Phi _1,\Phi =(\Phi _0,\Phi _1)\in {\mathbb R}^2,\end{array}} \]où:
\[ \boxed {\forall \delta \Phi =(\delta \Phi _0,\delta \Phi _1)\in {\mathbb R}^2,\Lambda (\Phi ,\delta \Phi )=L(\delta \Phi ).} \]et les formes bilinéaire $\Lambda $ et linéaire $L$ sont définies par:
\[ \boxed { \begin{array}{l} \Lambda (\Phi ,\delta \Phi )\hskip-2.84527559055pt=\hskip-1.42263779528pt\frac{2}{T}\hskip-2.84527559055pt\displaystyle \sum _{n\geq 1}\frac{\int _0^ T\xi (s)\sin (\frac{n\pi s}{T})\hskip-2.84527559055pt\int _0^ T\hskip-0.56905511811pt\upsilon (s)\sin (\frac{n\pi s}{T})}{a_0+b_0\frac{n^2\pi ^2}{T^2}}\\ L(\delta \Phi )=({\mathcal M}\dot X(0)-{\mathcal C} X(0),\delta \Phi _0)_2-({\mathcal M}X(0),\delta \Phi _1)_2 \end{array}} \]avec les notations (la contrôlabilité, id $P^0=0$, est détaillée dans le pdf associé):
Remarque sur la contrôlabilité
Il est tentant de se limiter à un contrôle avec uniquement ${\mathcal B}\delta $ si ${\mathcal E}$ est négligeable, car plus simple. Or $-{\mathcal B}$ est une partie de la seconde colonne de ${\mathcal K}$ (la première est nulle). Notons la: ${\mathcal K2}=-{\mathcal B}-{\mathcal G}$.
La contrôlabilité en général n’est pas évidente. Ouvrir/fermer la vidéo. Ouvrir/fermer la vidéo.
Il semble donc plus sécurisant de contrôler avec ${\mathcal E}\dot\delta $, d’autant plus que le foiling se fait sur des allures allant du près au vent de travers et même au petit largue pour lesquelles ce terme est important.
Exemple numérique
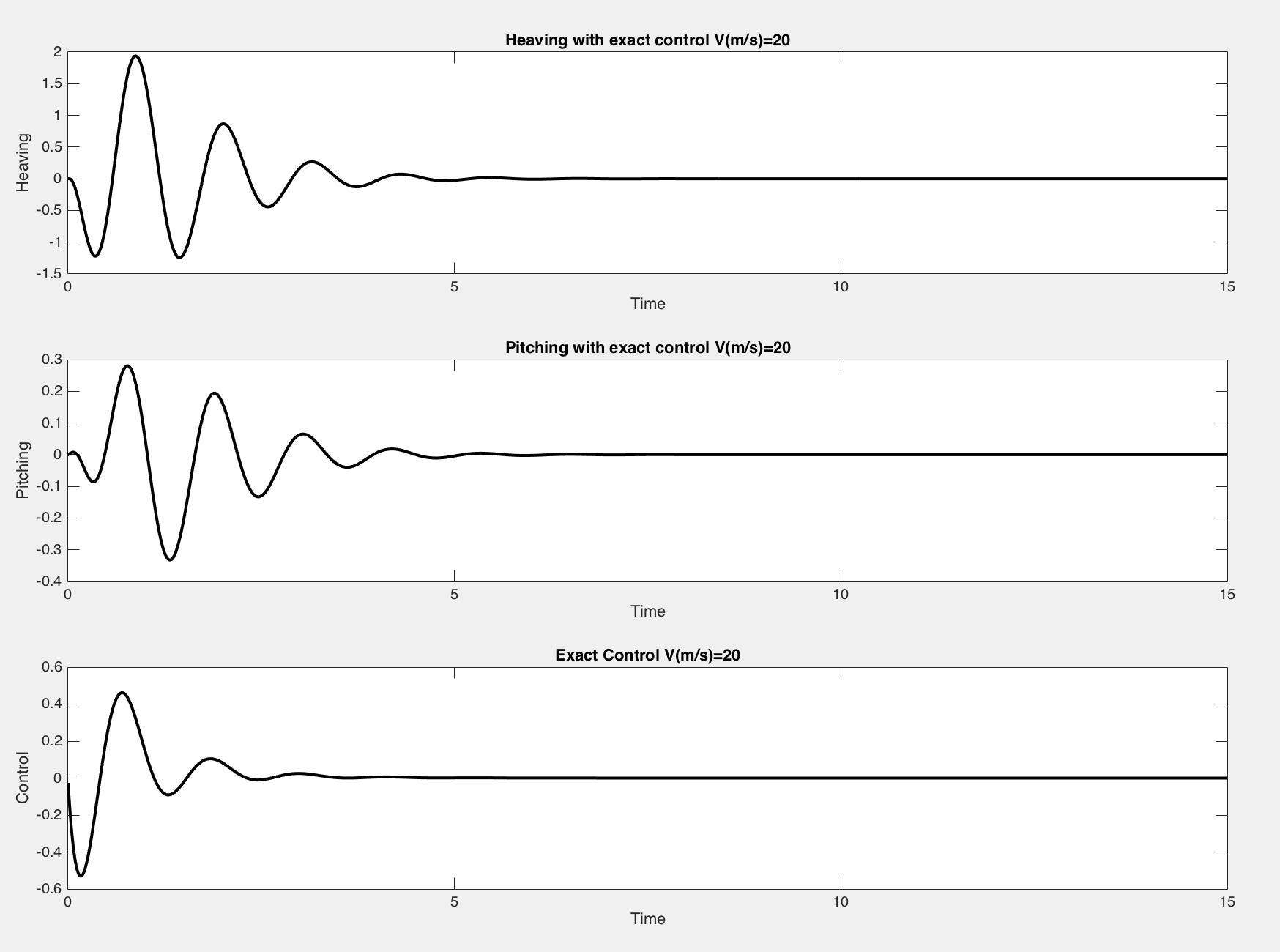
Nous donnons ci-après des résultats qui utilisent des données approximatives. Sur cet écran nous utilisons un contrôle exact. Le bateau avance à la vitesse $V (10m/s$ et $20m/s)$. On applique le contrôle exact suite à une pertubation initiale.
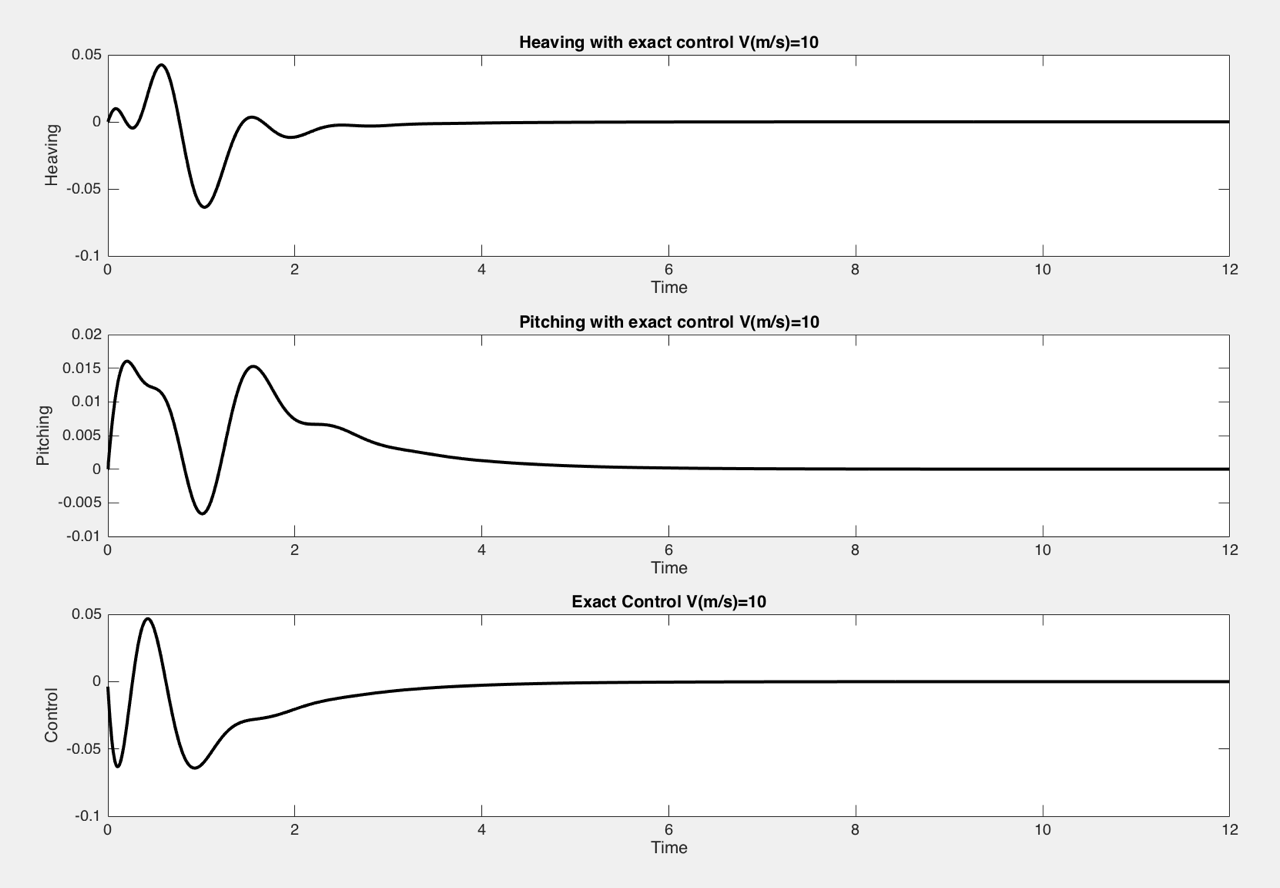
![\includegraphics[width=4.5cm,height=5cm]{aeroimages/c12V15sc.png}](images/img-0010.png)
![\includegraphics[width=4.8cm,height=5cm]{aeroimages/c12v20sc.png}](images/img-0011.png)
| Cours 12: Application: A class America’s cup |