| Cours 9: Contrôle du flutter |
5 Exemple de simulation
Simulation numérique 1
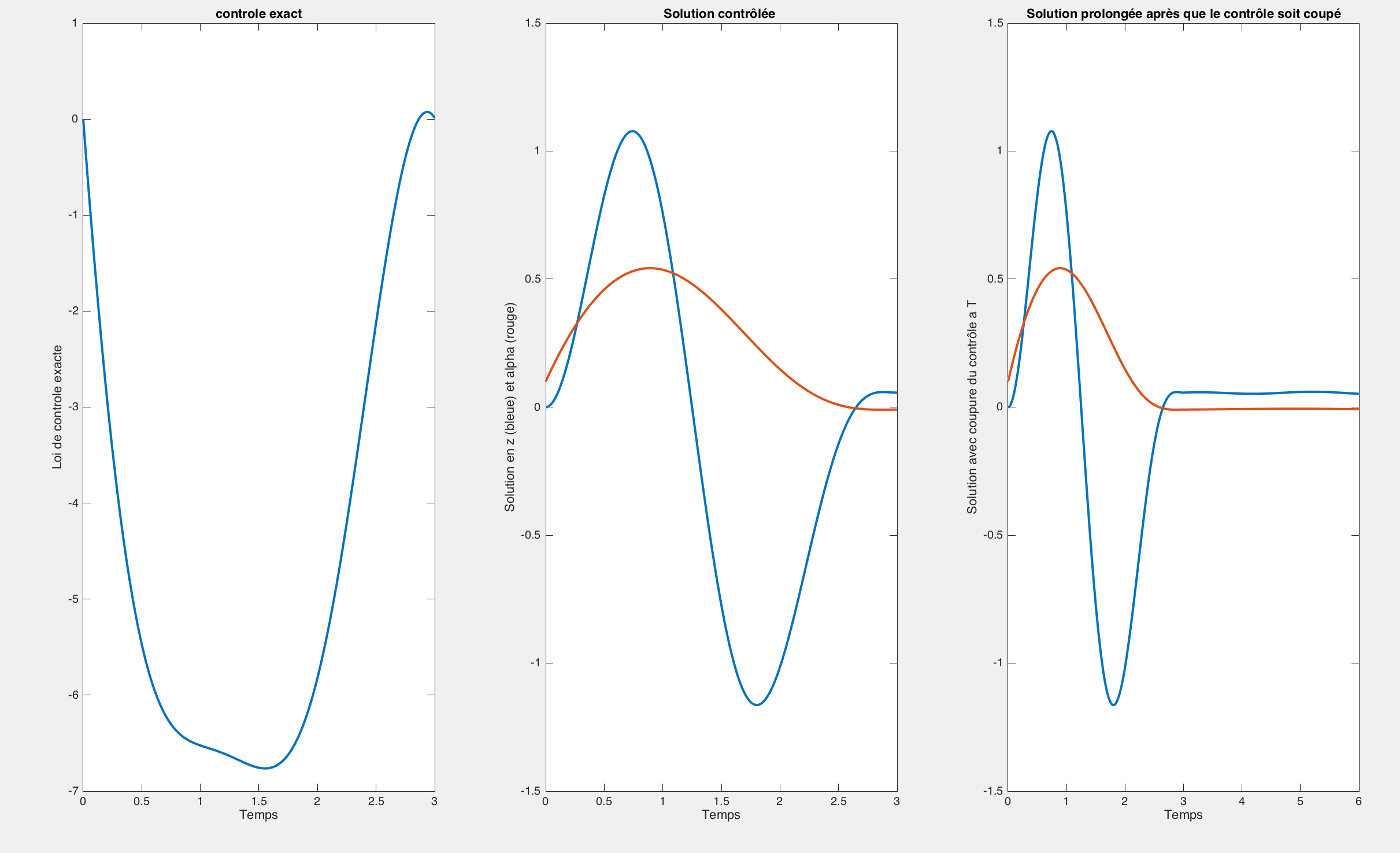
Considérons le cas $C=0$. Simulations pour une vitesse $V$ sans flutter, (gauche le contrôle exact, au centre sol. contrôlée , droite sol. avec contrôle coupé ($z$ en bleu, $\alpha $ en rouge):

![\includegraphics[width=10cm,height=2.3cm]{aeroimages/imageb9-82}](images/img-0004.png)
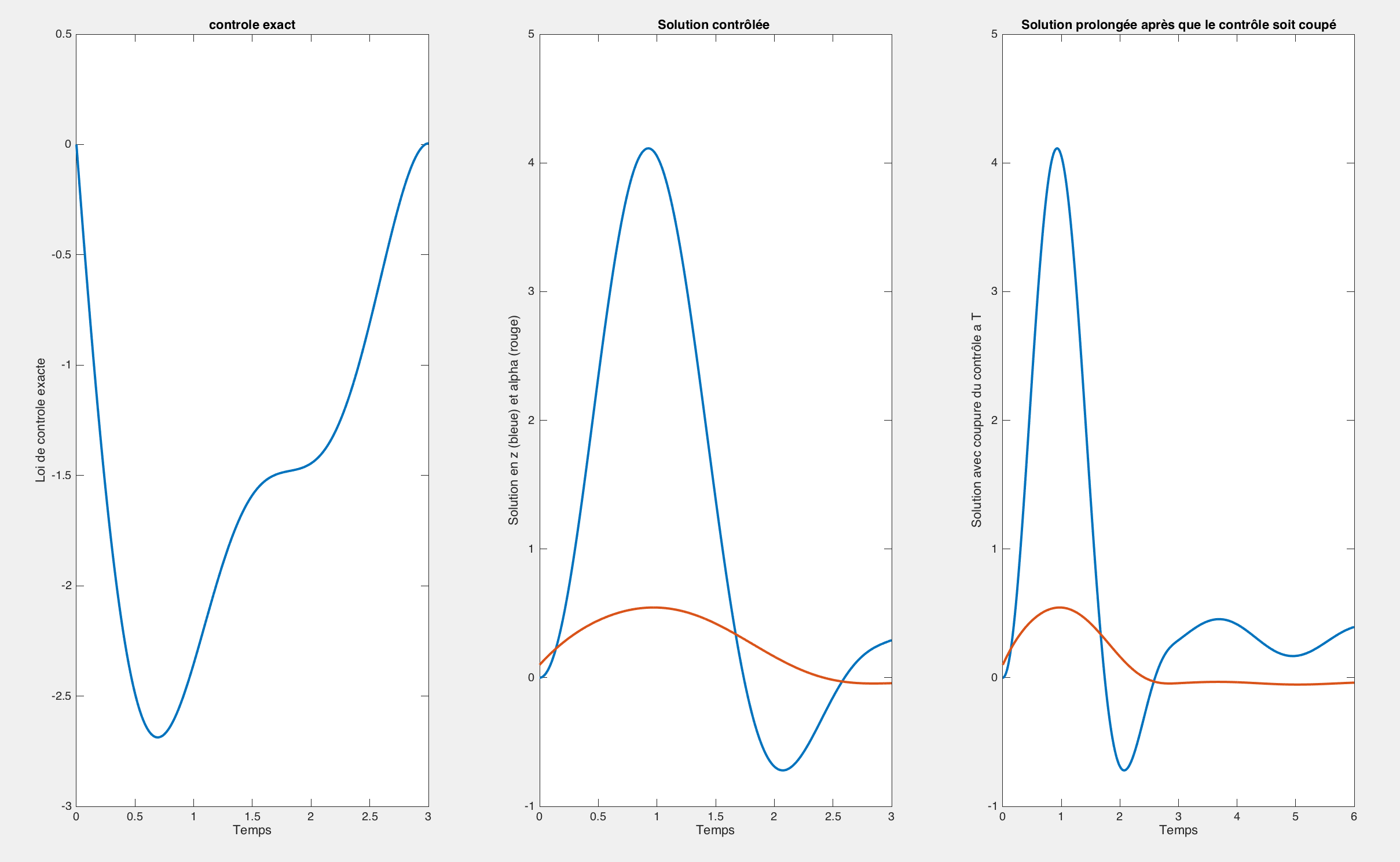
puis la même chose pour une vitesse dans la zone de flutter:
![\includegraphics[width=10cm,height=2.3cm]{aeroimages/imageb9-83}](images/img-0005.png)
Programmes de simulation sans/avec contrôle: Sans contrôle. (matlab) Sans contrôle (python). Avec contrôle (matlab). Avec contrôle (python).
Simulation numérique 2
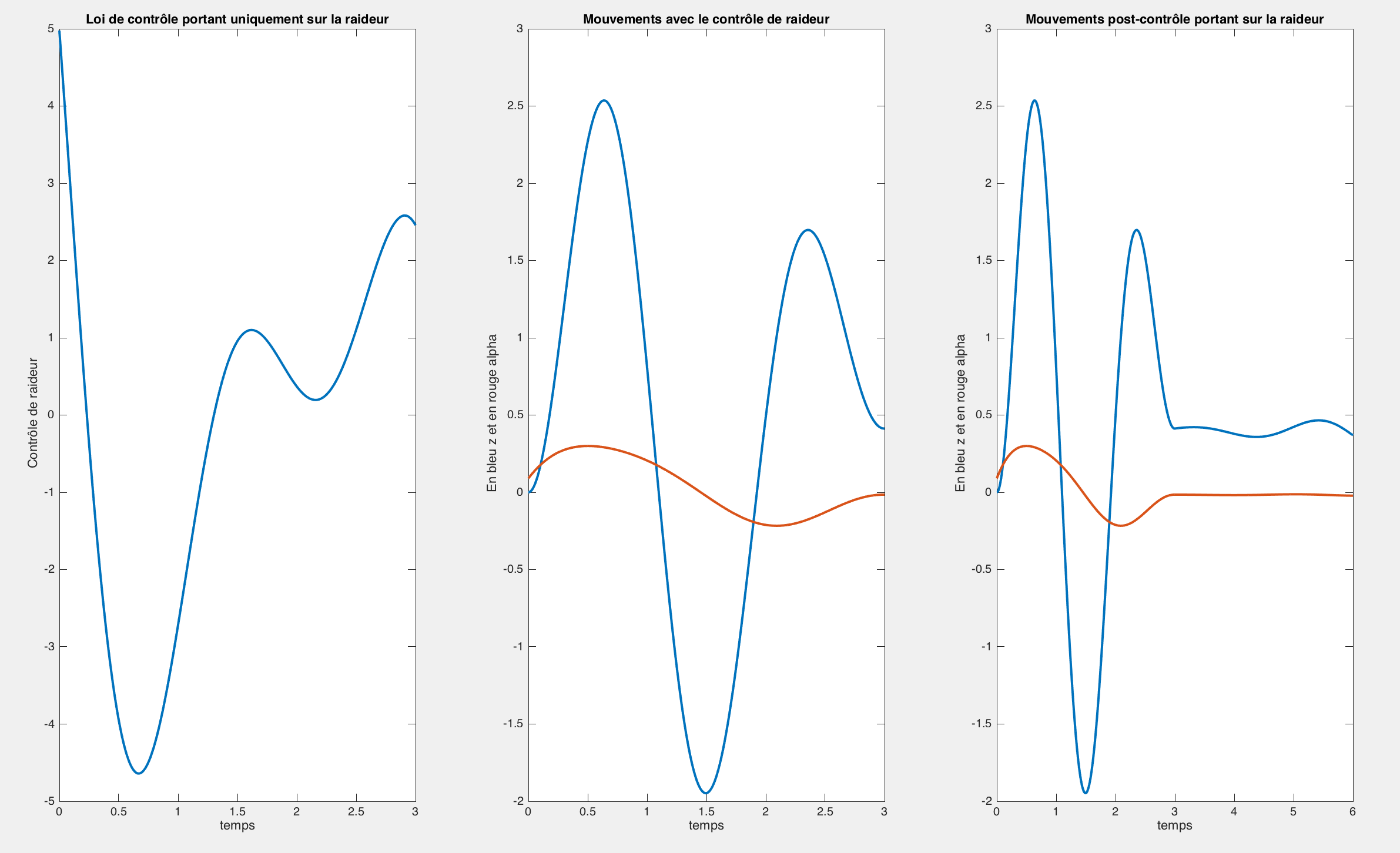
Ici $B\neq 0$ et $C\neq 0$. Simulations pour une vitesse sans flutter, (le contrôle exact, sol. contrôlée, puis en coupant le contrôle):
![\includegraphics[width=10cm,height=2.3cm]{aeroimages/imageb9-84.png}](images/img-0006.png)
puis la même chose pour une vitesse dans la zone de flutter:
![\includegraphics[width=10cm,height=2.3cm]{aeroimages/imageb9-85.png}](images/img-0007.png)
Programmes de simulation: Contrôle exact avec terme $\dot\beta $(matlab) Version python avec $\dot\beta $
L’ajout du terme en $\dot\beta $ permet d’avoir un contrôle plus lisse, mais avec des amplitudes plus grandes de la gouverne.
| Cours 9: Contrôle du flutter |