| Cours 10: Contrôle non linéaire du Stall Flutter (galloping) |
2.4 l’équation non linéaire du contrôle
Calcul d’un contrôle exact
L’équation précédente est non linéaire par rapport à l’inconnue qui est le vecteur des conditions initiales de $p^1$, c’est-à-dire $P\in {\mathbb R}^2$. Un algorithme de point fixe est le suivant (l’indice $n$ est le n$^0$ de l’itéré).
On construit alors, pour $P^{n}\in {\mathbb R}^2$ et $y^{n}\in {\cal C}^1([0,T])$ donnés, la fonction $p^{n}$ solution de ($p^{n}(0)\hskip-1.42263779528pt=\hskip-1.42263779528ptP^{n}_0,\dot p^{n}(0)\hskip-1.42263779528pt=\hskip-1.42263779528ptP^{n}_1$): \[ \boxed {\hskip-1.42263779528pt\ddot p^{n}\hskip-1.42263779528pt+\hskip-1.42263779528pt(\displaystyle \frac{\partial q}{\partial \dot y}(\dot y^{n})-\xi )\dot p^{n}\hskip-1.42263779528pt+\hskip-1.42263779528pt(k\hskip-1.42263779528pt+\hskip-1.42263779528pt\displaystyle \frac{\partial ^2q}{\partial \dot y^2}(\dot y^{n})\ddot y^ n)p^{n}\hskip-1.42263779528pt=\hskip-1.42263779528pt0.} \] On calcule ensuite $p^{n+1}$ la solution de l’équation en $p$, pour $p^ n$ fixé, et paramétrée par la donnée initiale $P^{n+1}\in {\mathbb R}^2$ solution de:
( attention $h(p^ n)$ est calculé en recalculant $y^{n+\frac{1}{2}}$ avec le contrôle $-bp^ n$)
Puis, pour $p^{n+1}$ ainsi fixé, on construit $y^{n+1}$ solution de: \[ \boxed {\ddot y^{n+1}\hskip-1.42263779528pt+\hskip-1.42263779528pt\xi \dot y^{n+1}\hskip-1.42263779528pt+\hskip-1.42263779528ptky^{n+1}\hskip-1.42263779528pt-\hskip-1.42263779528ptq(\dot y^{n+1})\hskip-1.42263779528pt=\hskip-1.42263779528pt-b^2p^{n+1},y^{n+1}(0)\hskip-1.42263779528pt=\hskip-1.42263779528pty_0,\dot y^{n+1}(0)\hskip-1.42263779528pt=\hskip-1.42263779528pty_1} \]
Calcul d’un contrôle exact suite...
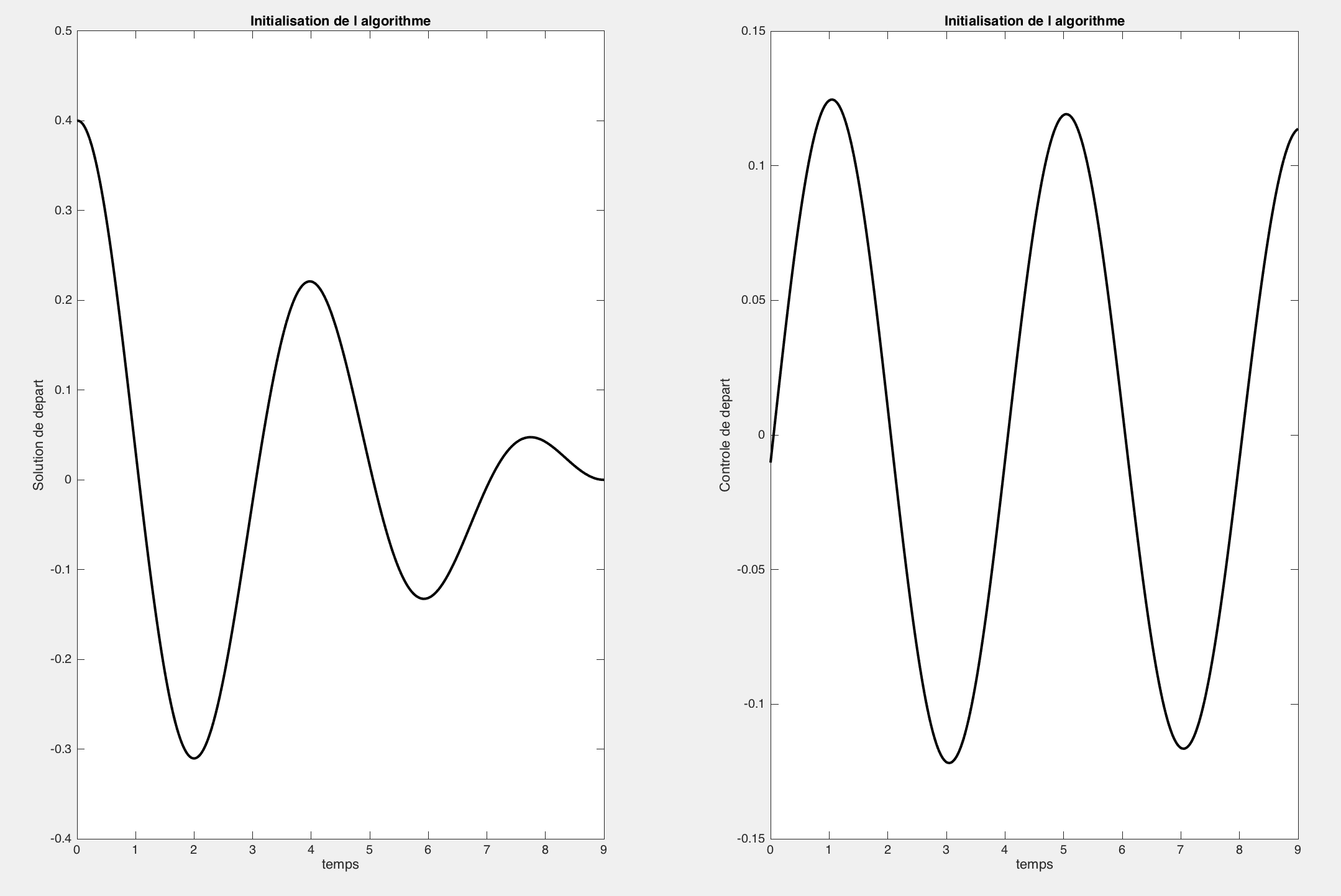
On reprend la démarche précédente jusqu’à convergence (espérée) de $P^{n+1}$. Pour initialiser l’algorithme on utilise pour $y^{n}$ et $P^ n$ (valeurs initiales pour $n=1$) le contrôle du système linéarisé autour de l’origine (pas de terme $q(\dot y^ n)$). $P^ n$ est alors associé au contrôle de HUM du système linéarisé autour de l’origine. C’est-à-dire tel que:
| Cours 10: Contrôle non linéaire du Stall Flutter (galloping) |